


Úvod do robotiky
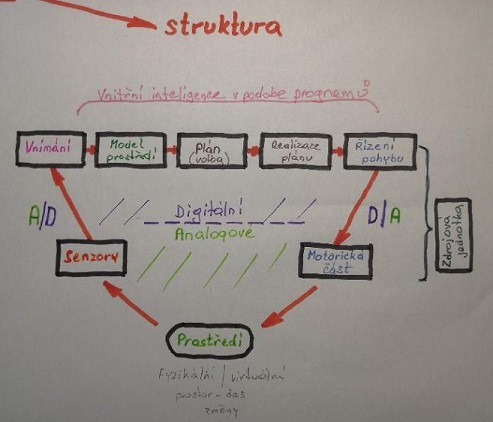
Charakteristika a struktura
EK
ROBOTY

Robotika má vazby s obory
- elektronika (prvky, senzory, obvody, zdroje, komunikace, ...)
- mechanika (konstrukce, spoje, převody, pohon, ...)
- informatika (algoritmy, programování, umělá inteligence, strojové učení...)
- řízení (regulace, automatizace, adaptace, optimalizace, ...)
Stabilní roboty
- průmyslový roboty a manipulátory na stálém stanovišti
Mobilní roboty
- autonomní systémy
(schopnost samostatně vykonávat zadanou úlohu: zdolávat překážky, pohybovat se v neznámém prostoru)
- dálkově řízené systémy operátorem
(operátor má informace o pracovním prostoru v okolí robota)
Další rozdělení podle:
- typu prostředí
(na souši, ve vodě, ve vzduchu, v kosmu, ...)
- účelu nasazení
(manipulační, pro montáž, průzkum, asistenční, ve zdravotnictví, vojenství, pro zábavu, ...)
- typu pohybu
(kolové, pásové, kráčející, plazivé, šplhající, skákající a hybridní.)

